
Afficher 21 à 30 des 34 résultats trouvés
Université Ontario Tech (Institut universitaire de technologie de l'Ontario)
Recherche sur l’aéroacoustique, les interactions fluide-structure, les écoulements turbulents, les vibrations induites par des écoulements, et le contrôle du bruit et des vibrations.

Université Ontario Tech (Institut universitaire de technologie de l'Ontario)
Nos recherches mettent en lumière tout le potentiel que recèle l’Internet des objets dans sa capacité de nous offrir des interactions intelligentes et de changer notre façon d’interagir avec ce qui nous entoure afin de vivre de manière plus rationnelle, sécuritaire et productive
Université de Waterloo
Sciences pharmaceutiques, science des matériaux et ingénierie

Université Ontario Tech (Institut universitaire de technologie de l'Ontario)
Toxicologie aquatique, essais environnementaux, protéomique, métabolomique, chimie bioanalytique et bio-informatique
Image
Université Ontario Tech (Institut universitaire de technologie de l'Ontario)
Recherche dans les domaines de la mécatronique, de la robotique et de l’automatisation, ainsi que de la conception optimale.
Université Ontario Tech (Institut universitaire de technologie de l'Ontario)
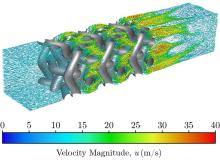
Recherche sur la performance du moteur Stirling, développement et essais de moteurs Stirling à haut rendement, et recherche de solutions pour créer de l’électricité sans carbone, fiable et abordable.
Image

Université Ontario Tech (Institut universitaire de technologie de l'Ontario)
Optimisation de la conception numérique, de la fabrication numérique, de l’inspection numérique, ainsi que du jumelage et de la maintenance numériques.
Université de Sherbrooke
Recherche sur les mécanismes moléculaires associés au cancer.

Université de Sherbrooke
Service de laboratoire en caractérisation de matériaux solides variés comme poudres nanométriques, catalyseurs, résidus miniers, roches, céramiques, caoutchoucs, plastiques, thermoplastics et autres

Université de Waterloo
Recherche et enseignement en matière de collaboration robot-robot et humain-robot à l’aide de robots à poste fixe, marcheurs, roulants, volants et à lévitation magnétique